丹佛斯運(yùn)動控制器在遠(yuǎn)程伺服控制中的應(yīng)用
發(fā)布時(shí)間:2019-08-02 16:20:33來源:
一、 Epsilon SWB發(fā)泡模機(jī)運(yùn)動控制要求:
但是如果使用異步伺服電機(jī),用一臺伺服驅(qū)動器同時(shí)驅(qū)動兩臺電機(jī),利用異步電機(jī)的固有特性,可以方便地實(shí)現(xiàn)轉(zhuǎn)速同步,并且轉(zhuǎn)矩輸出一致。右圖為此種運(yùn)行模式時(shí)兩臺電機(jī)的輸出轉(zhuǎn)矩,可見輸出轉(zhuǎn)矩的不平衡是由于電機(jī)的轉(zhuǎn)矩-轉(zhuǎn)差特性不同造成的,這個(gè)問題可以用選擇相同廠家相同型號電機(jī)的辦法解決,而且比較好是選額定轉(zhuǎn)差比較大的異步電機(jī)。 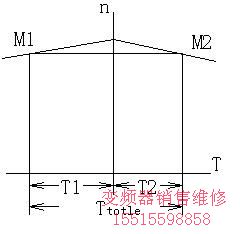
| 圖三、機(jī)械抱閘控制時(shí)序圖 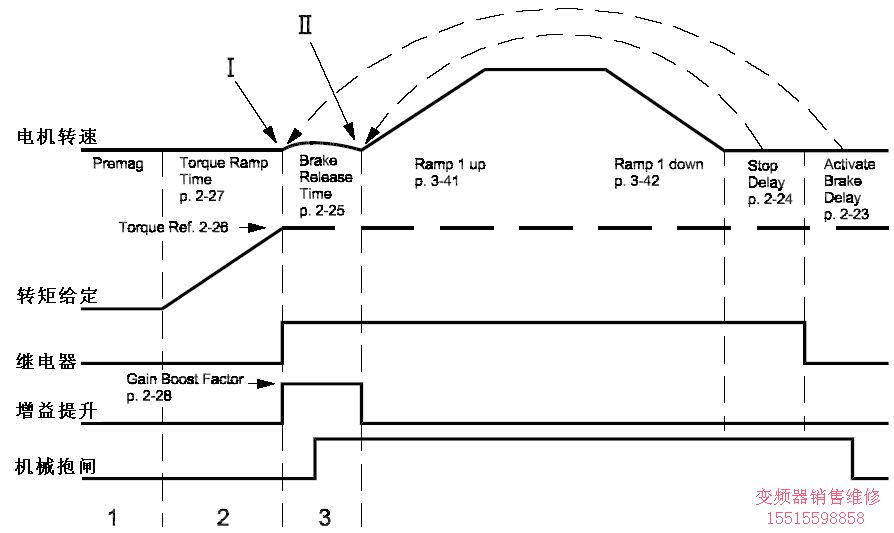 |
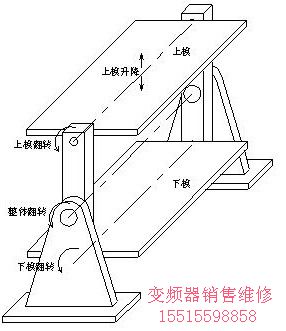
| 機(jī)械角度 |
| 電機(jī)角位移 |
| 圖四、電機(jī)角位移-機(jī)械翻轉(zhuǎn)角度關(guān)系圖 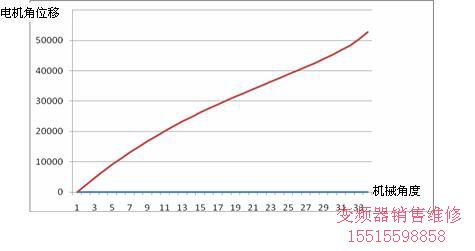 |
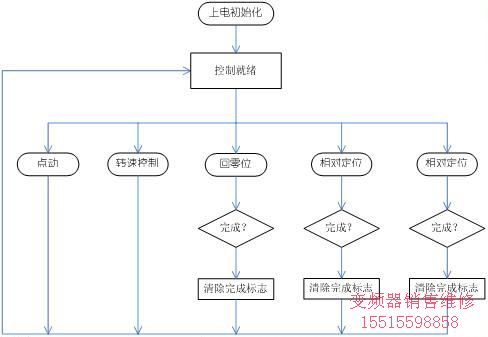
二、 運(yùn)動控制的高速總線通訊接口程序編制和定義:
| | PCD1 | PCD2 | PCD3 | PCD4 |
| 寫入 | 控制字 | 速度給定 | 位置給定 | 轉(zhuǎn)矩給定 |
| 讀出 | 狀態(tài)字 | 當(dāng)前實(shí)際速度 | 當(dāng)前實(shí)際位置 | 當(dāng)前實(shí)際轉(zhuǎn)矩 |
| 位 | 位 = 0 | 位 = 1 |
| 0 | 自由運(yùn)行 | 伺服鎖定 |
| 1 | 正轉(zhuǎn) | 反轉(zhuǎn) |
| 2 | | 點(diǎn)動 |
| 3 | | 轉(zhuǎn)速控制模式 |
| 4 | | 轉(zhuǎn)矩控制模式 |
| 5 | | 相對定位控制模式 |
| 6 | | 絕對定位控制模式 |
| 7 | | 回零位 |
| 8 | | 故障復(fù)位 |
| 9 | | 動作完成標(biāo)志清除 |
| 10-15 | | 保留 |
| 位 | 位 = 0 | 位 = 1 |
| 0 | 無正轉(zhuǎn)限位信號 | 正轉(zhuǎn)限位信號動作 |
| 1 | 無反轉(zhuǎn)限位信號 | 反轉(zhuǎn)限位信號動作 |
| 2 | 機(jī)械制動抱緊 | 機(jī)械制動釋放 |
| 3 | 運(yùn)動過程中 | 動作完成 |
| 4 | 驅(qū)動系統(tǒng)正常 | 驅(qū)動系統(tǒng)報(bào)警 |
| 5 | | 運(yùn)動控制器控制就緒 |
| 6 | | 回零位完成 |
| 7-15 | | 保留 |
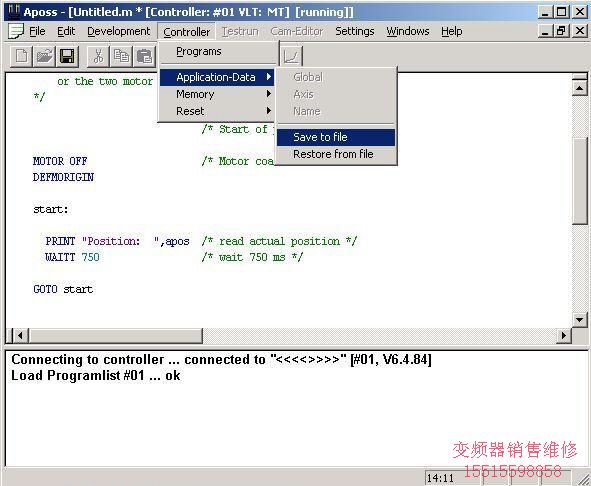
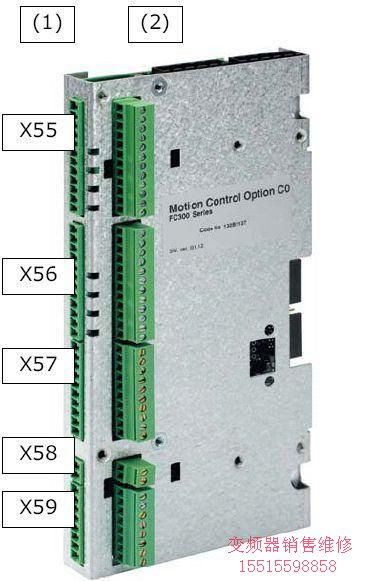
三、 丹佛斯運(yùn)動控制器簡介:
| 快捷功能鍵 |
| 編輯窗口 |
| 對話窗口 |
| 控制器編譯器 通訊信息窗口 |
| 菜單功能選擇 |
| 下拉式菜單 |
| 狀態(tài)條,顯示當(dāng)前行號列號等 |
四、 主控PLC的編程辦法: